Vision-Language-Action Model Integration
Endox AI: Robotics Software Engineer
Overview
At Endox AI, I worked on integrating Vision-Language-Action (VLA) models with industrial robotic systems to enable natural language control of robotic manipulation tasks. This project involved developing a complete perception and control pipeline that translates human language commands into precise robotic motions.
Project Goals
The primary objective was to create an autonomous robotic system capable of understanding and executing natural language commands in real-time. This required:
- Seamless integration between AI models and robotic hardware
- Real-time performance optimization for industrial applications
- Robust handling of edge cases and singularities
- High precision in end-effector positioning and trajectory execution
System Architecture
The system consisted of three main components working in concert:
1. Perception Layer - VLA Model
The Vision-Language-Action model serves as the brain of the system, processing natural language commands and visual input to generate motion plans. The model was deployed on an NVIDIA Jetson Orin platform, which provided the computational power necessary for real-time inference while maintaining a compact form factor suitable for robotic applications.
2. Control Layer - ROS + URScript
The control layer bridges the gap between high-level motion plans and low-level robot control. Using ROS (Robot Operating System) for communication and URScript for direct robot control, this layer handles:
- Motion plan validation and safety checks
- Real-time trajectory execution
- Singularity avoidance and workspace boundary detection
- Timing synchronization between perception and actuation
3. Hardware Layer - UR5e Robotic Arm
The Universal Robots UR5e collaborative robot arm served as the physical platform for executing the generated motion plans. Its 6 degrees of freedom and high repeatability made it ideal for precision manipulation tasks.
End-Effector & Perception Hardware

OnRobot gripper mounted on UR5e end-effector
GoPro camera for visual perception and object detection
Technical Challenges & Solutions
Singularity Handling
Robotic singularities occur when the robot's joints align in specific configurations, causing loss of controllability. I implemented several strategies to detect and avoid these configurations:
- Real-time Jacobian monitoring to detect approaching singularities
- Alternative path planning when singularities were detected
- Graceful degradation strategies for unavoidable near-singular poses
Workspace Edge Cases
The robot's workspace has natural boundaries where motion becomes constrained or impossible. To handle these edge cases, I developed:
- Predictive workspace boundary checking before motion execution
- Safe recovery procedures when approaching workspace limits
- User feedback mechanisms to indicate workspace violations
Timing & Synchronization
Real-time robotic systems require precise timing coordination between perception, planning, and control. Key optimizations included:
- Asynchronous processing pipelines to minimize latency
- Predictive trajectory buffering to ensure smooth motion
- Dynamic rate adjustment based on system load
Calibration & Precision
Achieving high-precision manipulation required meticulous calibration of multiple coordinate frames:
Coordinate Frame Calibration
- Camera-to-Base Calibration: Established accurate transformation between the camera coordinate frame and the robot base frame using checkerboard calibration and hand-eye calibration techniques
- Tool Center Point (TCP) Calibration: Precisely defined the end-effector's tool center point to ensure accurate positioning
- Workspace Calibration: Mapped the operational workspace and validated reachability
Trajectory Tuning
To improve motion quality and task success rates, I iteratively refined trajectory parameters:
- Velocity and acceleration profiles optimized for smooth motion
- Path blending parameters adjusted for continuous motion
- End-effector orientation constraints for task-specific requirements
Performance Optimization
NVIDIA Jetson Orin Deployment
Deploying the VLA model on the Jetson Orin required significant optimization to achieve real-time performance:
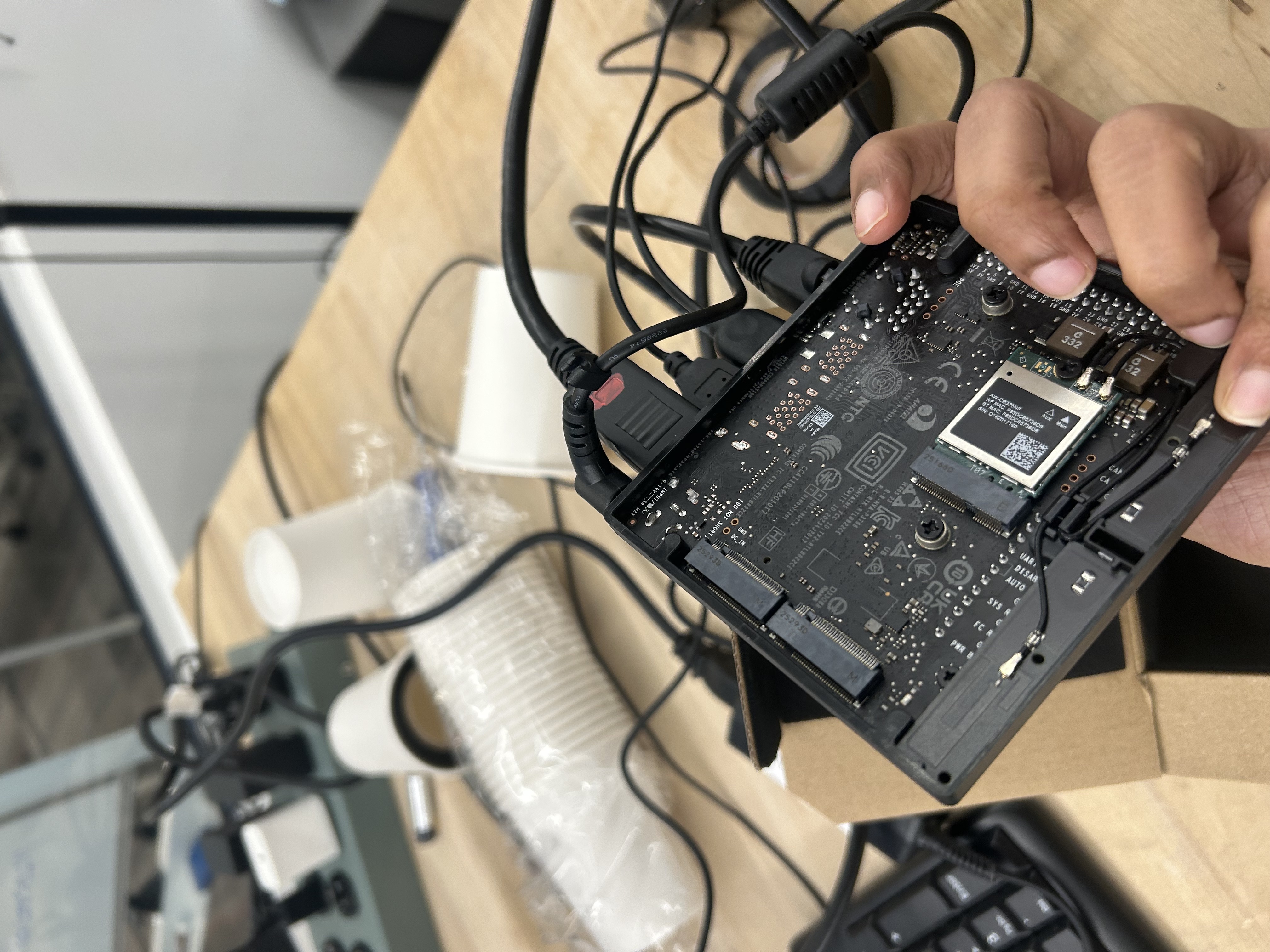
NVIDIA Jetson Orin integrated with the UR5e robotic system

NVIDIA Jetson screen
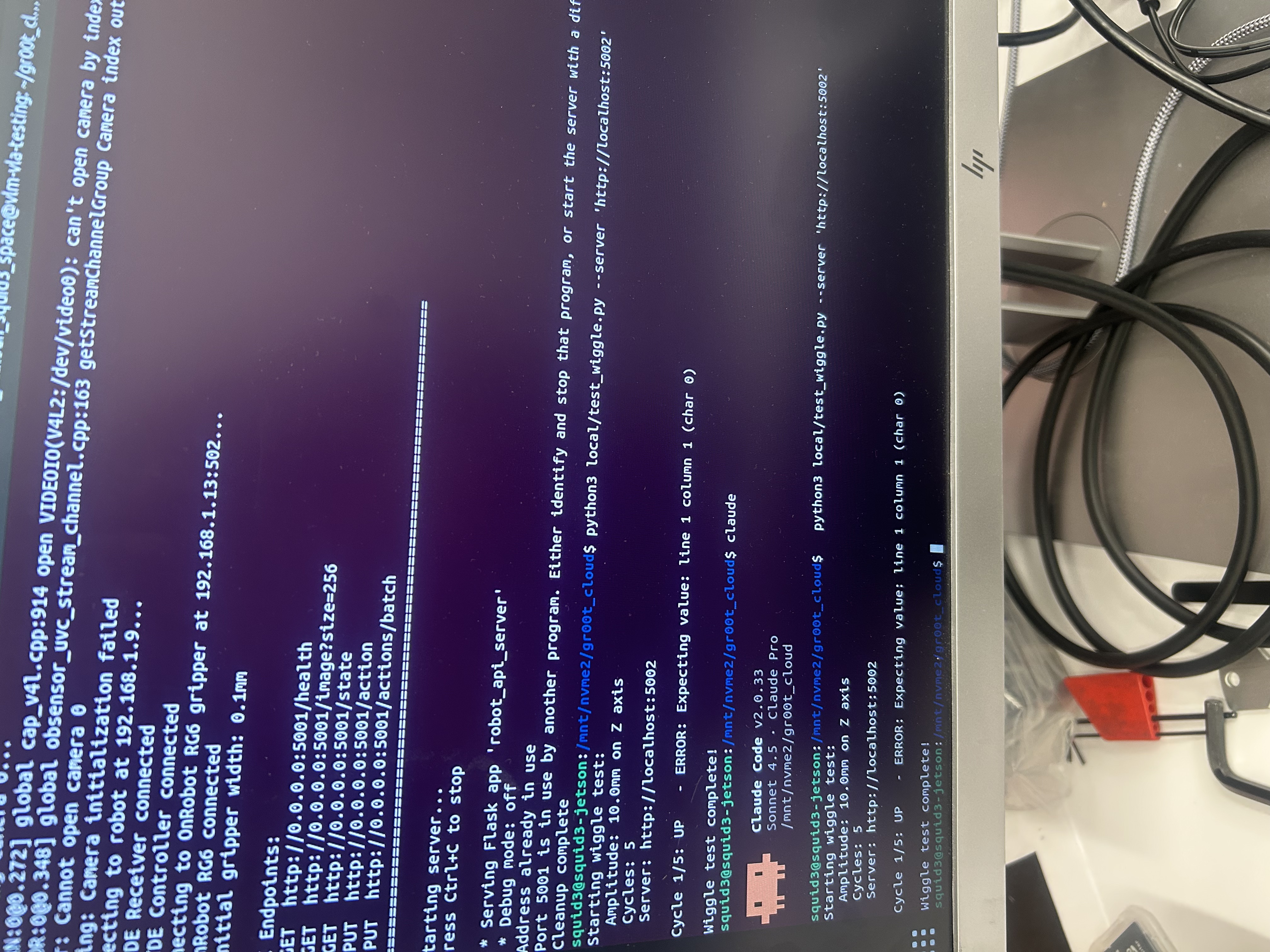
Terminal output showing NVIDIA GROOT model initialization, robot connection, and server startup sequence
- Model Optimization: Applied TensorRT optimization to reduce inference latency by 40%
- Memory Management: Implemented efficient memory allocation strategies to handle continuous video streams
Inference Latency
Achieved end-to-end latency of under 200ms from command input to motion initiation, enabling responsive and natural human-robot interaction.
Results & Impact
The integrated system successfully demonstrated:
- Reliable natural language command understanding and execution
- Real-time performance suitable for interactive applications
- High precision in task execution with sub-millimeter accuracy
- Robust handling of edge cases and error conditions
Demo Videos
Demo 1: Natural Language Command Execution with NVIDIA GROOT
Watch the NVIDIA GROOT VLA model interpret the natural language command "move towards the bottle" and execute precise motion planning to approach the target object in real-time. The system demonstrates seamless integration between language understanding, visual perception, and robotic control.
Demo 2: Precision End-Effector Control
The UR5e robotic arm executing precise motion control based on commanded end-effector poses. This demonstration shows the robot moving through specified positions (x, y, z) and orientations (roll, pitch, yaw) with high accuracy, showcasing the calibrated coordinate frames and optimized trajectory planning implemented in the control system.